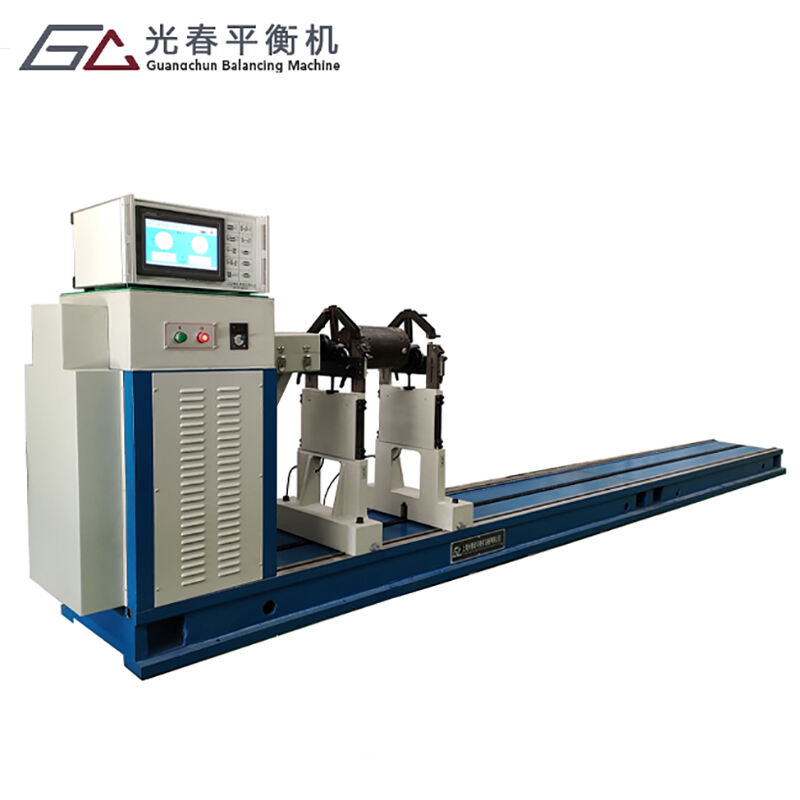
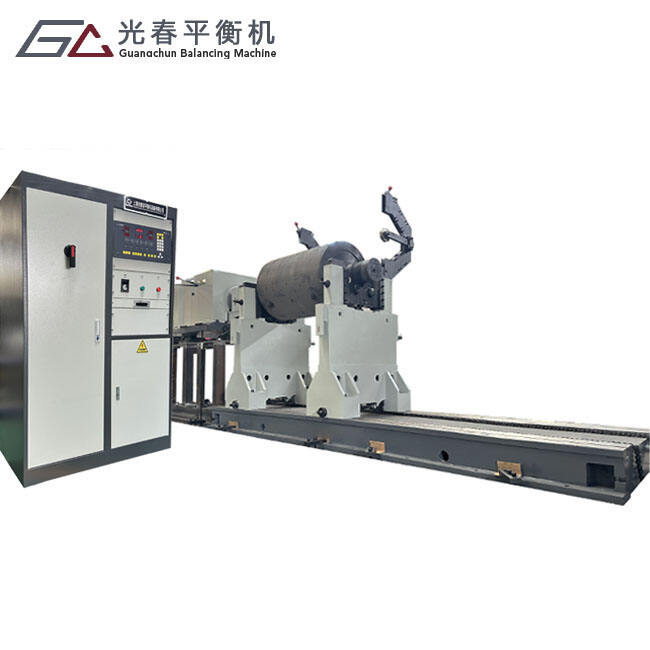
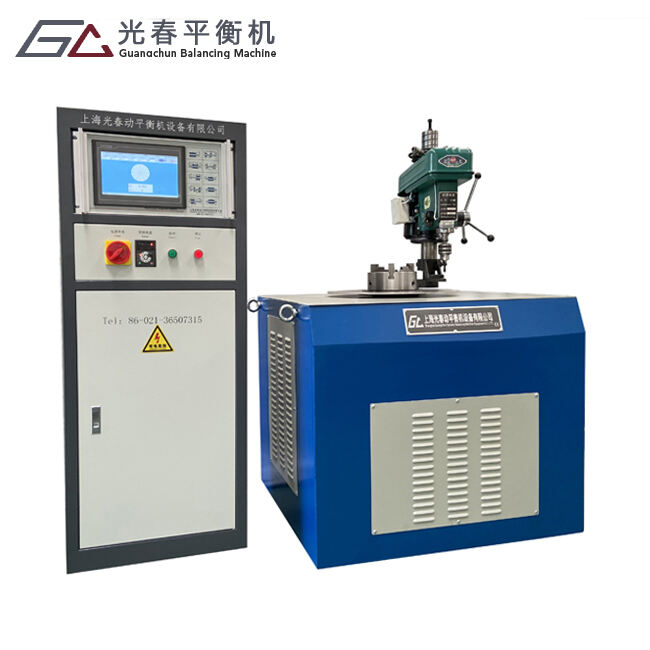
դինամիկ ռոտորի հավասարակշռում
Շարժական ռոտորի հավասարակշռությունը կրիտիկական արդյունաբերական գործընթաց է, որն ապահովում է, որ պտտվող սարքերը աշխատեն ամենաբարձր արդյունավետությամբ և հուսալիությամբ: Այս բարդ տեխնիկան ներառում է պտտվող մասերի զանգվածի բաշխման չափում և ճշգրտում՝ թրթիռների հետևանքով առաջացած խնդիրները վերացնելու համար: Գործընթացը օգտագործում է առաջադեմ էլեկտրոնային սարքեր՝ հայտնաբերելու համար անհավասարակշռությունները, իսկ ռոտորը պտտվում է շահագործման արագություններով, ապահովելով ճշգրիտ ճշտումների համար իրական ժամանակի տվյալներ: Տեխնոլոգիան կիրառում է հատուկ զգայուն սենսորներ, որոնք չափում են թրթիռի լայնույթն ու ֆազային անկյունը տարբեր արագություններով, թույլատվելով տեխնիկական անձնակազմին որոշել ճշգրիտ տեղերը, որտեղ պետք է ավելացվի կամ հեռացվի քաշ: Շարժական հավասարակշռությունը անհրաժեշտ է տարբեր կիրառումների համար՝ փոքր էլեկտրաշարժիչներից մինչև մեծ արդյունաբերական շարժիչներ, ապահովելով հարթ աշխատանք և սարքավորումների երկար ծառայության ժամանակահատված: Գործընթացը հաշվի է առնում ինչպես ստատիկ, այնպես էլ զույգ անհավասարակշռությունները՝ լուծելով խնդիրներ, որոնք միայն ստատիկ հավասարակշռությունը չի կարող լուծել: Այս համապարփակ մոտեցումն այն դարձնում է անփոխարինելի միջոց բարձր արագությամբ աշխատող սարքերի պահպանման համար, որտեղ նույնիսկ փոքրագույն անհավասարակշռությունները կարող են խնդիրներ առաջացնել: Տեխնոլոգիան զարգացել է՝ ներառելով համակարգչային վերլուծություն, թույլատվելով ավելի ճշգրիտ չափումներ և ճշտումներ, քան այդ նախ: Այս առաջընթացը շարժական ռոտորի հավասարակշռությունը դարձրել է անհրաժեշտ գործիք ժամանակակից արտադրության և սպասարկման գործողություններում: