ռոտորի հավասարակշռություն
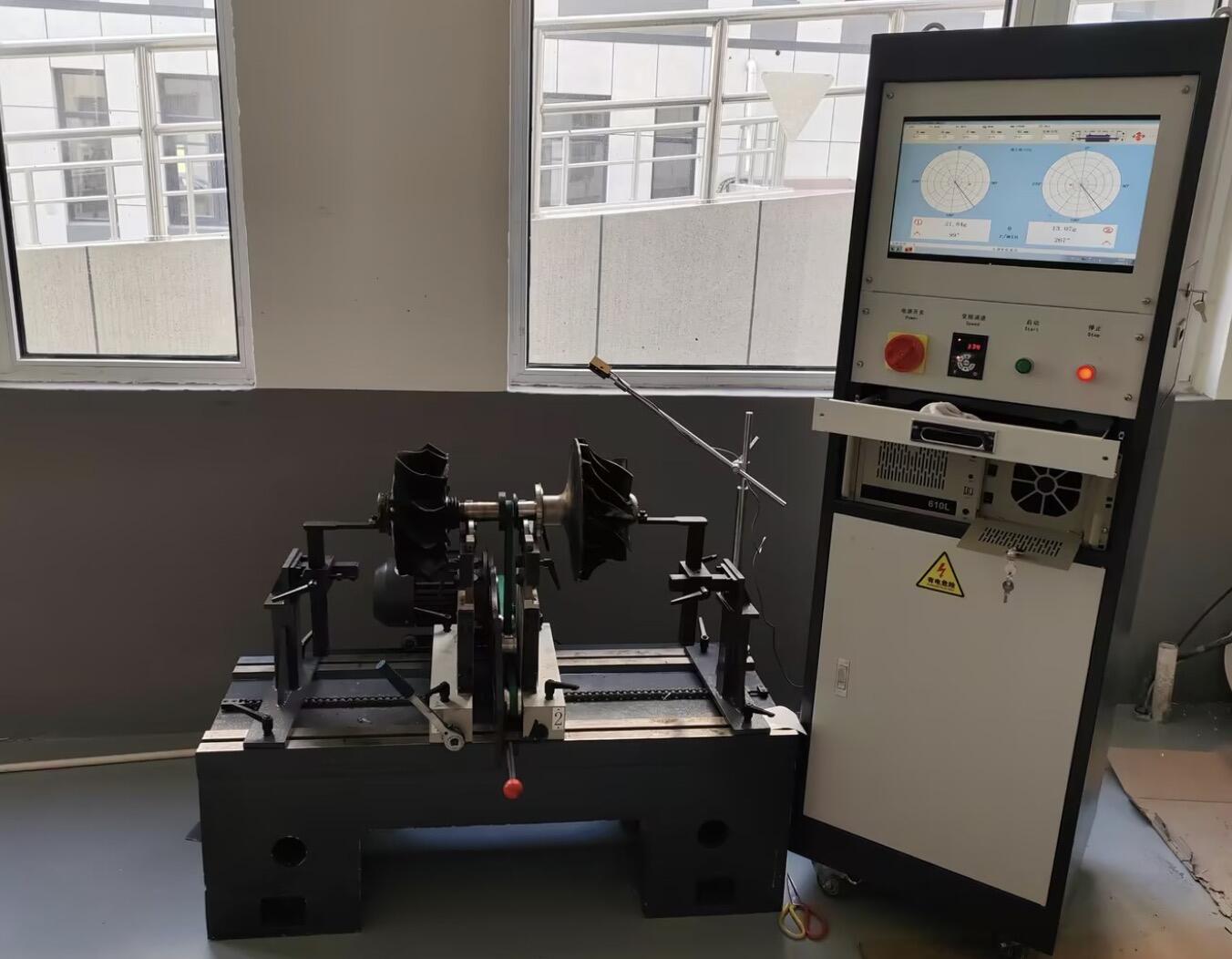
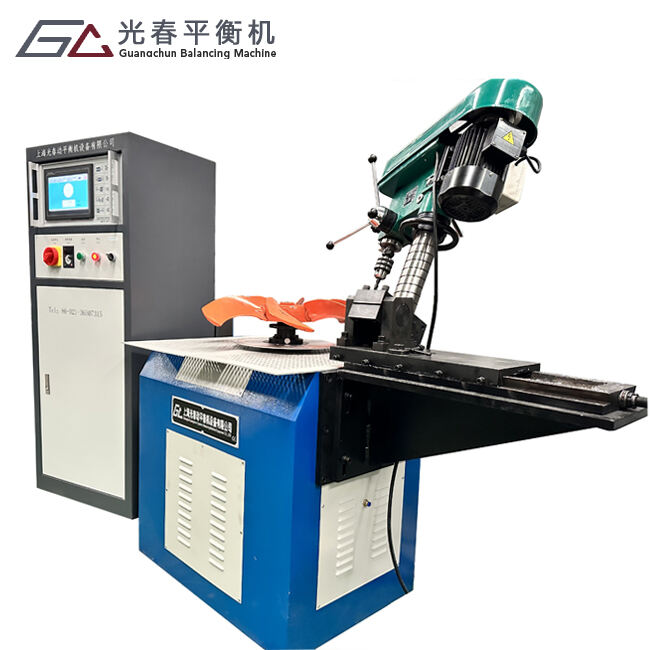
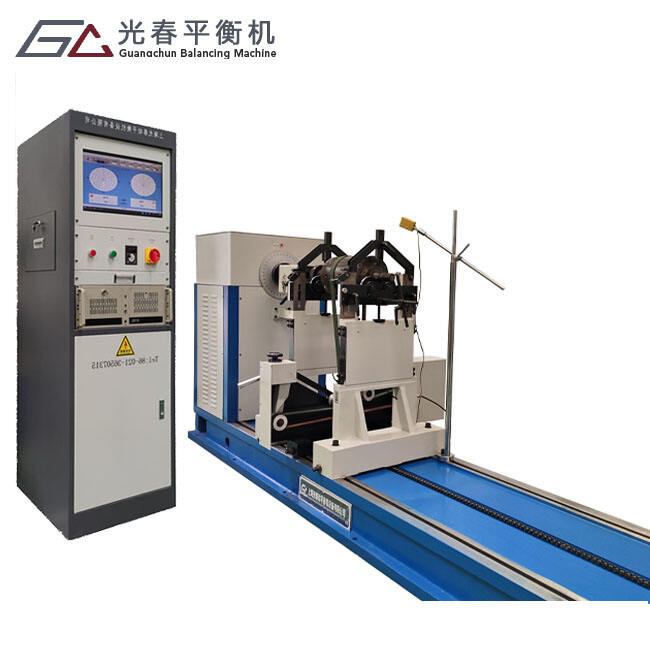
Ռոտորի հավասարակշռությունը ճշգրիտ չափման և ճշգրտման կարևոր գործընթաց է, որն անհրաժեշտ է պտտվող մեքենաների օպտիմալ աշխատանքը պահպանելու համար: Այս բարդ համակարգը վերլուծում և ուղղում է պտտվող բաղադրիչներում կշռի անհավասար բաշխումը՝ ապահովելով հարթ աշխատանք տարբեր արդյունաբերական կիրառումներում: Տեխնոլոգիան օգտագործում է առաջադեմ զգայուն սենսորներ և համակարգչային վերլուծություն՝ հայտնաբերելու համար անհավասարություններ, որոնք կարող են կազմել նույնիսկ մի քանի գրամի կոտորակներ, ինչպես նաև ցածր, ինչպես և բարձր արագություններում ապահովելով լրիվ տվյալներ անհավասարության մասին: Ժամանակակից ռոտորի հավասարակշռման համակարգերը թվային տեխնոլոգիաներ են օգտագործում թրթռման լայնույթի և ֆազային անկյունների չափման համար՝ ստեղծելով անհավասարության վիճակի մանրամասն զեկույցներ: Գործընթացը ներառում է ինչպես ստատիկ, այնպես էլ դինամիկ հավասարակշռության տեխնիկաներ, որտեղ ստատիկ հավասարակշռությունը վերաբերում է մեկ հարթության խնդիրներին, իսկ դինամիկ հավասարակշռությունը կարգավորում է բարդ բազմահարթական իրավիճակները: Այս համակարգերը կարող են աշխատել իրական ժամանակում՝ թույլատվելով պտտվող սարքավորումների անընդհատ հսկողություն և ճշգրտում գործողության ընթացքում: Կիրառումները տարածվում են բազմաթիվ արդյունաբերություններում, ներառյալ ավտոմոբիլային արտադրությունը, տիեզերական ճարտարագիտությունը, էլեկտրաէներգիայի արտադրությունը և արդյունաբերական արտադրությունը: Տեխնոլոգիան զարգացել է և ներառել է արհեստական ինտելեկտի և մեքենայական ուսուցման հնարավորություններ, թույլատվելով կանխատեսողական պահպանում և ինքնաշխատ ճշգրտման պրոտոկոլներ: Այս առաջընթացը զգալիորեն կրճատել է սարքավորումների կանգառի ժամանակը և երկարացրել է պտտվող մեքենաների շահագործման ընթացքում: